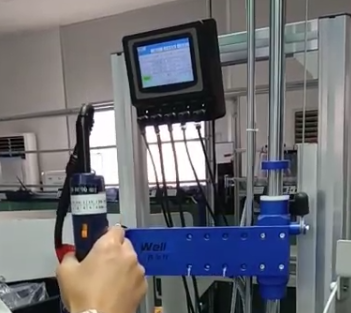
平衡臂是一种根据人机工程学设计的工具,也叫定位力臂(又称定位抗扭力臂、反力臂、定位支架臂、定位平衡臂),主要与拧紧工具配合使用,实现螺钉的顺序拧紧、拧紧工艺的防错防漏、拧紧数据的采集与保存、降低操作者劳动强度等。提高生产效率、生产安全,避免重复劳动、过度劳动。
按外形分,平衡臂可分为垂直型平衡臂和折叠型平衡臂两大类。
垂直型平衡臂参数列表
| 型号 | 适用扭力 | 有效荷载 | 上下行程 | 横向半径 | 是否带传感器 |
| WLS-PHB-S025-R | ≤25Nm | 90N | 500mm | 500mm | 否 |
| WLS-PHB-S025-T | 是 | ||||
| WLS-PHB-S100-R | ≤100Nm | 150N | 否 | ||
| WLS-PHB-S100-T | 是 | ||||
| WLS-PHB-S200-R | ≤200Nm | 220N | 否 | ||
| WLS-PHB-S200-T | 是 | ||||
| WLS-PHB-S300-R | ≤300Nm | 300N | 否 | ||
| WLS-PHB-S300-T | 是 | ||||
| WLS-PHB-S400-R | ≤400Nm | 400N | 否 | ||
| WLS-PHB-S400-T | 是 |
折叠型平衡臂参数列表
| 型号 | 适用扭力 | 有效荷载 | 上下行程 | 横向半径 | 是否带传感器 |
| WLS-PHB-F025-R | ≤25Nm | 90N | 500mm | R500mm | 否 |
| WLS-PHB-F025-T | 是 | ||||
| WLS-PHB-F100-R | ≤100Nm | 150N | R750mm | 否 | |
| WLS-PHB-F100-T | 是 | ||||
| WLS-PHB-F200-R | ≤200Nm | 220N | R930mm | 否 | |
| WLS-PHB-F200-T | 是 |
按是否带传感器分,平衡臂可分为带传感器型和不带传感器型两大类。
带传感器的平衡臂配有独立的定位控制器。可通过定位控制器制定拧紧策略,如设置拧紧点位、拧紧顺序等。
快速、便捷。
通过示教(标定)功能快速制定拧紧策略,节省编程时间。
防呆、防错
定位控制器通过定位力臂传感器可精确识别螺丝拧紧的位置与顺序,通过与PLC实施互联交互,控制拧紧工具的启停,确保操作员使用正确的工具在正确的位置以正确的顺序和扭矩进行拧紧操作。
增加操作员灵活性
定位控制器能逐步指导操作员,减少每个操作员的培训量,且允许操作员在不影响质量水平的情况下在各个操作之间切换。
兼容性好
可预设20套拧紧配方,每套拧紧配方可设定40个拧紧点位,不同配方见可通过操作界面或PLC灵活调用,以适应在拧紧过程中快速切换产品。
数据采集与保存
可采集、存储和查询拧紧数据(如位置、拧紧结果等)
分级管理
用户分级管理,不同层级权限不同,方便管理。
通讯简单
具备8点输入、8点输出。